Stereo Visualization
Unity project to visualize Stereo disparity maps
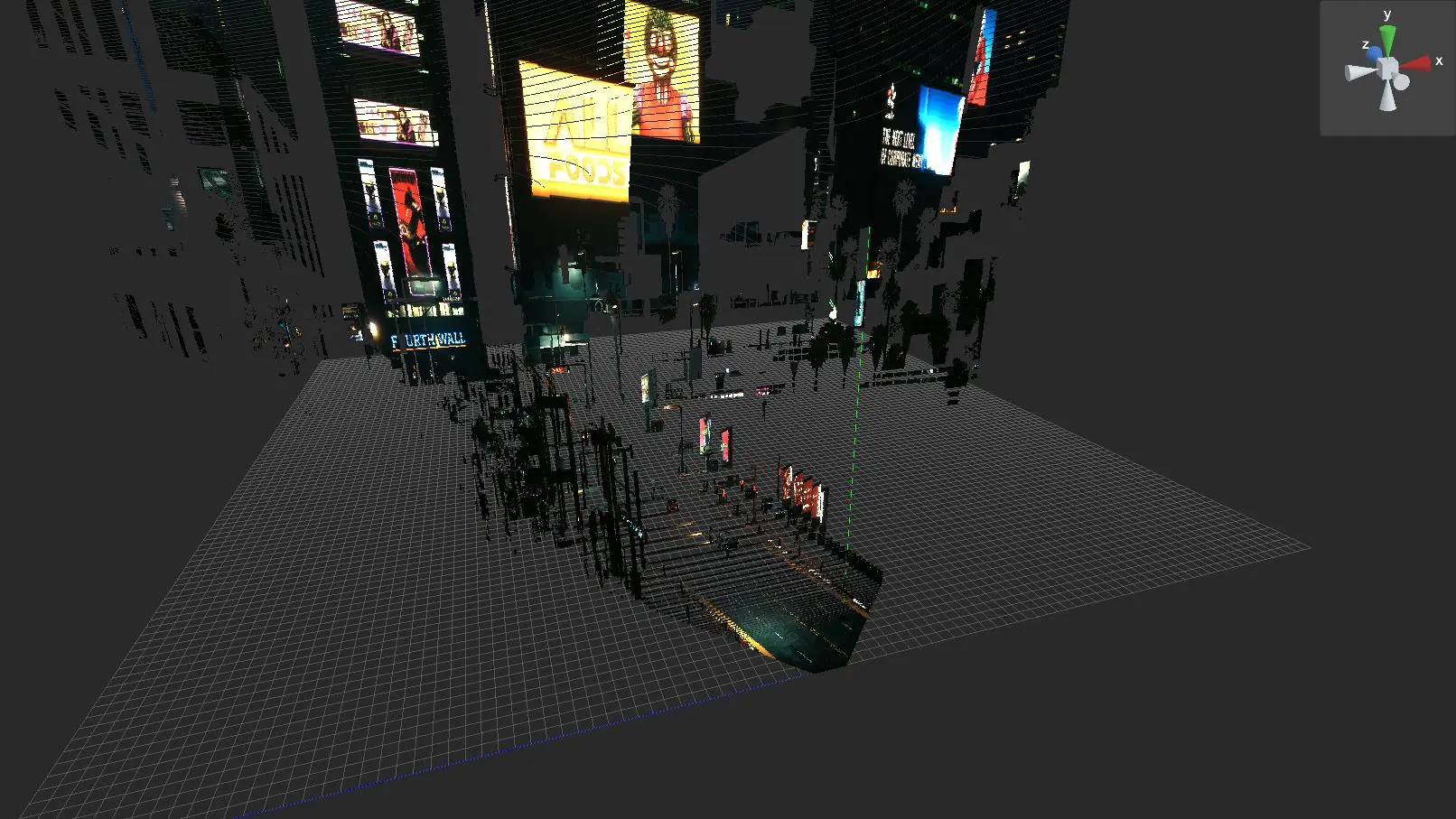
Unity Project to understand depth, disparity maps and plotting a point cloud using a combination of Depth map and Camera image. It is called Stereo Visualization because it was meant to serve as a visualization tool to see point cloud from the disparity maps predicted using Stereo Images. I made the project over weekends to understand a bit about how disparity and depth maps work.
I also uses a Pcx point cloud shader from here Pcx which gave me a better understanding of how this shader worked and how Geometry shaders are written in Unity.
I still don’t understand the conventional method of how disparity maps are predicted from pair of Stereo Images. (I was once asked about this in a job interview on how to get depth map from two camera images which have different FoV. I wasn’t able to answer it and the interviewer did not look pleased at all. 😁)
The project uses OpenCVSharp to read Camera images and depth images.
The dataset in the video above ir from here The depth maps are stored in EXR format which are read using OpenCV. Using the given camera intrinsic parameters each pixel of the camera images is projected into world space.